Tensor cartesiano
La transformación es pasiva, ya que se cambian las coordenadas pero no el sistema físico.
Para tensores cartesianos de orden 1, un vector cartesiano a se puede escribir algebraicamente como una combinación lineal de los vectores base ex, ey, ez: donde las coordenadas del vector con respecto a la base cartesiana se denotan como ax, ay, az.
Las etiquetas cartesianas se reemplazan por índices tensoriales en los vectores base ex ↦ e1, ey ↦ e2, ez ↦ e3 y las coordenadas ax ↦ a1, ay ↦ a2, az ↦ a3.
En general, la notación e1, e2, e3 se refiere a cualquier base, y a1, a2, a3 se refiere al sistema de coordenadas correspondiente, aunque aquí están restringidos al sistema cartesiano.
La notación utilizada para una función en análisis matemático lleva a escribir v − T(u),[1] mientras que la misma idea se puede expresar en notaciones matriciales e índices[2] (incluida la convención de la suma), respectivamente: Por la condición de linealidad, si u= ρr + σs para dos escalares ρ y σ y vectores r y s, entonces en notaciones de función e índice: y de manera similar para la notación matricial.
Se puede continuar con la idea anterior: si T toma dos vectores p y q, devolverá un escalar r. En notación de funciones se escribe r= T(p, q), mientras que en notaciones matriciales e indexada (incluida la convención de suma) respectivamente: El tensor T es lineal en ambos vectores de entrada.
Es posible tener un sistema de coordenadas con geometría rectangular si los vectores de la base son todos mutuamente perpendiculares y no están normalizados, en cuyo caso la base es ortogonal pero no ortonormal.
Sin embargo, las bases ortonormales son más fáciles de manipular y se utilizan con frecuencia en la práctica.
Los siguientes resultados son válidos para bases ortonormales, no ortogonales.
Diferenciando xi respecto a xk: entonces es un elemento de la matriz jacobiana.
Existe una correspondencia (parcialmente mnemotécnica) entre las posiciones de índice adjuntas a L y en la derivada parcial: i en la parte superior y j en la parte inferior, en cada caso, aunque para tensores cartesianos los índices se pueden escribir como subíndices.
En general, θij no es igual a θji, porque por ejemplo θ12 y θ21 son dos ángulos diferentes.
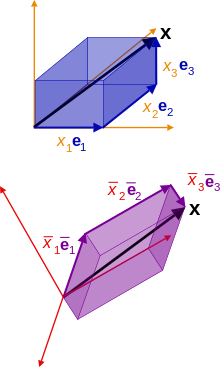
y las ecuaciones matriciales explícitas en 3d son: similarmente para La interpretación geométrica es que las componentes xi son iguales a la suma de proyectar las componentes xj sobre los ejes xj.
Por lo tanto, si bien las matrices L siguen siendo ortogonales, no son simétricas.
Se puede utilizar la base cartesiana para representar δ de esta manera.
Para el producto vectorial (×) de dos vectores, los resultados son (casi) al revés.
Nuevamente, suponiendo un sistema de coordenadas cartesiano 3D a la derecha, las permutaciones cíclicas en direcciones perpendiculares producen el siguiente vector en la colección cíclica de vectores: mientras que los vectores paralelos desaparecen claramente: y reemplazando las etiquetas cartesianas por la notación indxada como ya se ha mostrado anteriormente, se pueden resumir en: donde i, j, k son índices que toman valores 1, 2, 3.
Entonces, resulta que: Estas relaciones de permutación y sus valores correspondientes son importantes, y hay un objeto que coincide con esta propiedad: el símbolo de Levi-Civita, denotado por ε.
El producto mixto ahora se puede escribir como: con la interpretación geométrica del volumen (del paralelepípedo abarcado por a, b, c) y algebraicamente es un determinante:[3]: 23 Esto a su vez se puede utilizar para reescribir el producto vectorial de dos vectores de la siguiente manera: Al contrario de lo que parece, el símbolo de Levi-Civita no es un tensor, sino un seudotensor, sus componentes se transforman según: Por lo tanto, la transformación del producto cruzado de a y b es: y entonces a × b se transforma en un vector axial, debido al factor procedente del determinante.
Por ejemplo, está claro que los productos escalar y vectorial son distributivos sobre la suma de vectores: sin recurrir a construcciones geométricas.
Aunque el procedimiento es menos obvio, también se puede deducir la fórmula del triple producto vectorial.
Reescrito en notación indexada, se tiene que: y debido a que las permutaciones cíclicas de índices en el símbolo ε no cambian su valor, la permutación cíclica de índices en εkℓm para obtener εℓmk permite usar la identidad δ-ε anterior para convertir los símbolos ε en tensores δ: así: Téngase en cuenta que el proceso es antisimétrico en b y c, como se esperaba del lado izquierdo de la ecuación.
Identidades más complejas, como los productos cuádruples y así sucesivamente, se pueden deducir de manera similar.
Sean a= aiei y b= biei dos vectores, de modo que se transformen según aj= aiLij, bj= biLij.
El momento angular de una partícula puntual clásica que orbita alrededor de un eje, definido por J= x × p, es otro ejemplo de seudovector, con su correspondiente tensor antisimétrico: Aunque los tensores cartesianos no aparecen en la teoría de la relatividad, la forma tensorial del momento angular orbital J da paso a la parte espacial del tensor del momento angular relativista, y la forma tensorial anterior del campo magnético B da paso a la parte espacial del tensor de campo electromagnético.
En todo momento, Φ(r, t) es un campo escalar, y es un campo vectorial, en los que todos los campos escalares y vectoriales son funciones de la posición r y del tiempo t. El operador gradiente en coordenadas cartesianas viene dado por: y en notación indexada suele abreviarse de varias maneras: Este operador actúa sobre un campo escalar F para obtener el campo vectorial orientado según tasa máxima de aumento de F: La notación indexada para los productos escalar y vectorial se traslada a los operadores diferenciales del cálculo vectorial.
En cada caso, el orden de las componentes del gradiente y del campo vectorial no debe intercambiarse, ya que esto daría como resultado un operador diferencial diferente: que podría actuar sobre campos escalares o vectoriales.
Los tensores cartesianos forman parte del álgebra tensorial, pero la estructura euclídea y la restricción de la base aporta algunas simplificaciones en comparación con la teoría general.
El álgebra tensorial general consta de tensores mixtos generales del tipo (p, q): con elementos básicos: las componentes se transforman según: en cuanto a las bases: Para los tensores cartesianos, solo importa el orden p + q del tensor en un espacio euclídeo con una base ortonormal, y todos los índices p + q se pueden reducir.
Los tensores cartesianos utilizan la notación tensorial indexada, en la que la varianza se puede pasar por alto y a menudo se ignora, ya que la ley de subir o bajar índices mantiene los componentes sin cambios.